Pelatih Kontrol Mengemudi Motor AC DC


Pelatih Kontrol Mengemudi Motor Kontrol Mengemudi dalam Sistem Mekatronika
1.Memahami struktur dan prinsip kerja kontrol transmisi mekanik dan listrik
2.Uji karakteristik motor AC dan motor DC
3.Eksperimen kontrol relai dari motor AC dan motor DC
4.Eksperimen PLC
5.Eksperimen transmisi mekanis
- Keterangan
- Pertanyaan
Keterangan
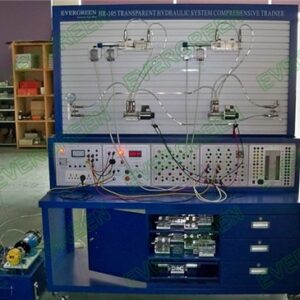
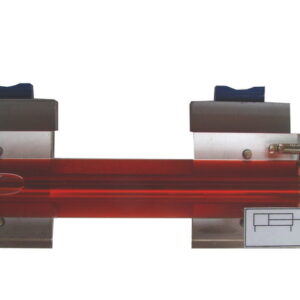
Pelatih Kontrol Mengemudi Motor dapat menyelesaikan eksperimen kontrol motor AC dan motor DC. Sistem pelatihan ini terdiri dari motor AC, motor DC, konverter frekuensi, kopel, peredam, dan lain-lain.Sementara itu, unit kontrol dari Pelatih Kontrol Mengemudi Motor adalah relai dan PLC. Sebagai hasilnya,ACDC Pelatih Kontrol Mengemudi Motor dalam Sistem Mekatronika adalah ide peralatan pengajaran untuk mekanik rekayasa, otomatisasi di universitas, perguruan tinggi, sekolah kejuruan, dan sekolah teknik ke dan untuk:
1.Memahami struktur dan prinsip kerja kontrol transmisi mekanik dan listrik
2.Uji karakteristik dari motor AC dan motor DC
3.Eksperimen kontrol relai motor AC dan motor DC
4.Eksperimen PLC
5.Eksperimen transmisi mekanis
Konten Eksperimental
Pelatih Kontrol Mengemudi Motor Konten Eksperimental
1,Eksperimen motor AC
1.1.motor AC(kontrol relai waktu)resistansi rotor seri mulai
1.2.Motor AC mulai dalam tegangan variabel
1.3.Joging motor AC / kontrol otomatis
1.4.Sepeda motor AC bekerja dan kembali ke awal
1.5.motor AC Y- mulai tegangan rendah
1.6.Rem penghubung balik motor AC
1.7.motor AC (kontrol saat ini)resistansi rotor seri mulai
1.8.Pengereman dinamis motor AC
1.9.Kontrol belok positif dan negatif motor AC
1.10.Kontrol frekuensi variabel Motor AC
1.11.Rem frekuensi variabel motor AC
2, percobaan motor DC
2.1.Putaran positif dan negatif motor DC
2.2.Resistansi seri DC mulai
2.3.Motor DC mulai tegangan rendah
2.4.Kontrol resistansi variabel motor DC
2.5.Kontrol tegangan variabel motor DC
2.6.Pengereman dinamis motor DC
2.7.Koneksi pembalikan daya motor DC
2.8.Pengereman penyumbatan motor DC
3, Eksperimen transmisi mekanis
3.1. Eksperimen penyambungan sistem penggerak elektromekanis
3.2. Uji efisiensi penggerak rantai
3.3.Inersia rotasi sistem yang menghitung dan menguji
4, Eksperimen pengontrol yang dapat diprogram PLC (pilihan)
4.1.Kuantitas digital(nilai digital)
4.2.Sinyal analog(kuantitas analog)
4.3.komunikasi PLC
Parameter Teknis Utama
Pelatih Kontrol Mengemudi Motor
T Utamateknis Parameter
| Pelatih Kontrol Mengemudi Motor | Spesifikasi | |
| SKU | 0405010140 | |
| Motor DC | Sumber Daya listrik | 220V |
| Kekuasaan | 0.75Kw | |
| Torsi | 4.72Nm | |
| Kecepatan | 1500R / min | |
| Peredam Motor AC | Sumber Daya listrik | 380V |
| Kekuasaan | 0.75Kw | |
| Torsi | 2.3Nm | |
| Kecepatan | 950R / min | |
| Reduktor Kecepatan Sikloid | Rasio Pengurangan | 1: 9 |
| Torsi | 0-250N.m | |
| Konverter Frekuensi | Sumber Daya listrik | 380V |
| Kekuasaan | 0.75Kw | |
| Frekuensi keluaran | 0.1 ~ 400Hz | |
| Sensor Torsi dan Kecepatan | Jangkauan | 0-20N.m |
| Keluaran takometer | 60 pulsa/kumparan | |
| Modul | PLC | S7-200 seri CPU224 |
| IKLAN | Siemens EM235 | |
| Sensor Torsi | Jangkauan | 0-20Nm |
| Memuat | 14kg/pcs | |
| Berat | 1kg, 4buah | |
| Dimensi Bangku | P × L × T | 1550 × 730 × 1700mm |
| Dimensi Transmisi | P × L × T | 1200 × 600 × 50mm |
| Ketinggian Bingkai Transmisi | 2000mm | |
*Produk dan daftar konfigurasi yang dijelaskan di sini dapat berubah tanpa pemberitahuan.
Gambar