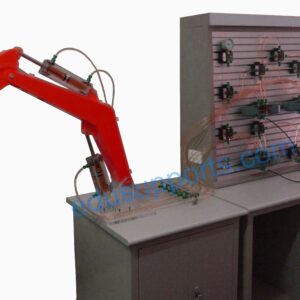
AC DC Motor Driving Control Trainer ဖြစ်သည်


Mechatronics စနစ်တွင် မော်တော်မောင်းနှင်မှု ထိန်းချုပ်ရေး Trainer ယာဉ်မောင်းထိန်းချုပ်မှု
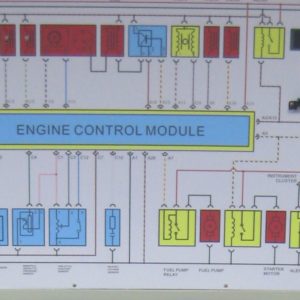
1.စက်ပိုင်းဆိုင်ရာနှင့် လျှပ်စစ်သွယ်တန်းခြင်း ထိန်းချုပ်ခြင်းဆိုင်ရာ ဖွဲ့စည်းပုံနှင့် လုပ်ဆောင်မှုနိယာမကို နားလည်ပါ။
2.AC မော်တာ နှင့် DC မော်တာ တို့၏ ထူးခြားချက် စမ်းသပ်မှု
3.Relay control experiments of AC motor and DC motor
4.PLC စမ်းသပ်မှုများ
5.စက်ပိုင်းဆိုင်ရာ ဂီယာစမ်းသပ်မှုများ
- ဖော်ပြချက်
- စုံစမ်းရေး
ဖော်ပြချက်
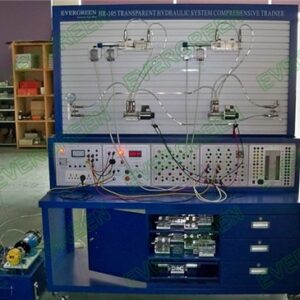
Motor Driving Control Trainer can complete control experiments of AC motor and DC motor.This training system is composed of AC motor, DC မော်တာ, ကြိမ်နှုန်းပြောင်းစက်, အဆက်အစပ်, လျှော့ချပေးသည်။, နှင့် etc. ထိုအချိန်တွင်, the control unit of Motor Driving Control Trainer is relay and PLC.As a result,AC DC Motor Driving Control Trainer in Mechatronics System is an idea teaching equipments for mechanical အင်ဂျင်နီယာ, တက္ကသိုလ်များတွင် အလိုအလျောက်စနစ်, ကောလိပ်များ, သက်မွေးဝမ်းကျောင်းကျောင်းများ, နှင့် နည်းပညာကျောင်းများ:
1.စက်ပိုင်းဆိုင်ရာနှင့် လျှပ်စစ်သွယ်တန်းခြင်း ထိန်းချုပ်ခြင်းဆိုင်ရာ ဖွဲ့စည်းပုံနှင့် လုပ်ဆောင်မှုနိယာမကို နားလည်ပါ။
2.Characteristic test of AC motor and DC motor
3.AC မော်တာနှင့် DC မော်တာများ၏ Relay ထိန်းချုပ်မှု စမ်းသပ်မှုများ
4.PLC စမ်းသပ်မှုများ
5.စက်ပိုင်းဆိုင်ရာ ဂီယာစမ်းသပ်မှုများ
Experimental Contents
Motor Driving Control Trainer Experimental Contents
1,AC မော်တာ စမ်းသပ်မှုများ
1.1.AC မော်တာ(အချိန် relay ထိန်းချုပ်မှု)စီးရီး rotor ခုခံမှုစတင်
1.2.AC မော်တာသည် ပြောင်းလဲနိုင်သော ဗို့အားဖြင့် စတင်သည်။
1.3.AC မော်တာ ပြေးခြင်း။ / အလိုအလျောက်ထိန်းချုပ်မှု
1.4.AC မော်တာစက်ဝန်း အလုပ်လုပ်ပြီး အစသို့ ပြန်သွားပါ။
1.5.AC မော်တာ Y- △ ဗို့အားကို လျှော့ချပါ။
1.6.AC မော်တာပြောင်းပြန်ချိတ်ဆက်ဘရိတ်
1.7.AC မော်တာ (လက်ရှိထိန်းချုပ်မှု)စီးရီး rotor ခုခံမှုစတင်
1.8.AC မော်တာ ရွေ့လျားဘရိတ်
1.9.AC motor သည် positive နှင့် negative turn control ဖြစ်သည်။
1.10.AC Motor သည် ပြောင်းလဲနိုင်သော ကြိမ်နှုန်းထိန်းချုပ်မှု
1.11.AC မော်တာ ပြောင်းလဲနိုင်သော ကြိမ်နှုန်း ဘရိတ်
2, DC မော်တာ စမ်းသပ်မှုများ
2.1.DC motor သည် positive နှင့် negative လှည့်ပါသည်။
2.2.DC စီးရီးခုခံမှုစတင်
2.3.DC မော်တာ လျှော့-ဗို့အား စတင်သည်။
2.4.DC မော်တာပြောင်းလဲနိုင်သောခုခံထိန်းချုပ်မှု
2.5.DC မော်တာတွင် ပြောင်းလဲနိုင်သော ဗို့အား ထိန်းချုပ်မှု
2.6.DC မော်တာ ရွေ့လျားဘရိတ်
2.7.DC မော်တာပါဝါပြောင်းပြန်ချိတ်ဆက်မှု
2.8.DC မော်တာ ပလပ်ပေါက် ဘရိတ်ပေါက်
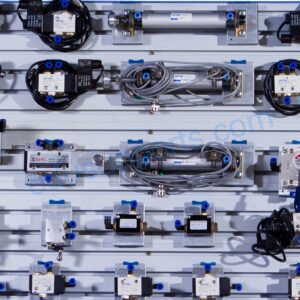
3, စက်ပိုင်းဆိုင်ရာ ဂီယာစမ်းသပ်မှုများ
3.1. အီလက်ထရွန်နစ်စက်မောင်းနှင်မှုစနစ် splicing စမ်းသပ်မှုများ
3.2. ကွင်းဆက်မောင်းနှင်မှုစွမ်းဆောင်ရည်စမ်းသပ်မှု
3.3.တွက်ချက်ခြင်းနှင့် စမ်းသပ်ခြင်းစနစ်၏ လှည့်ပတ်မှုအား
4, PLC programmable controller စမ်းသပ်မှုများ (ရွေးချယ်ခွင့်)
4.1.ဒစ်ဂျစ်တယ် ပမာဏ(ဒစ်ဂျစ်တယ်တန်ဖိုး)
4.2.လက်တံအချက်ပြ(analog ပမာဏ)
4.3.PLC ဆက်သွယ်မှု
ပင်မနည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
Main Tနည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| Motor Driving Control Trainer | သတ်မှတ်ချက် | |
| SKU | 0405010140 | |
| DC Motor | Power Supply | 220v |
| ပါဝါ | 0.75Kw | |
| Torque | 4.72Nm | |
| အရှိန် | 1500r / မိ | |
| AC Motor Reducer | Power Supply | 380v |
| ပါဝါ | 0.75Kw | |
| Torque | 2.3Nm | |
| အရှိန် | 950r / မိ | |
| Cycloid Speed Reductor | Reduction Ratio | 1: 9 |
| Torque | 0-250N.m | |
| Frequency Converter | Power Supply | 380v |
| ပါဝါ | 0.75Kw | |
| Output အကြိမ်ရေ | 0.1 ~ 400Hz | |
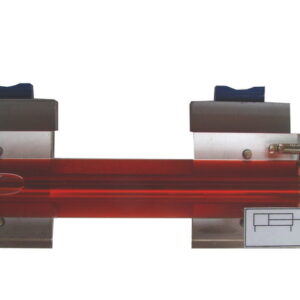
| Torque and Speed Sensor | Range | 0-20N.m |
| Tachometer Output | 60 ပဲမျိုးစုံ/ကွိုင် | |
| Module | PLC | S7-200 series CPU224 |
| A/D | Siemens EM235 | |
| Torque Sensor | Range | 0-20Nm |
| ဝန် | 14ကီလိုဂရမ်/အိတ်များ | |
| အလေးချိန် | 1ကီလိုဂရမ်, 4pcs | |
| Bench Dimensions | L × W × H | 1550 × 730 × 1700mm |
| Transmission Dimensions | L × W × H | 1200 × 600 × 50mm |
| The Height of Transmission Frame | 2000မီလီမီတာ | |
*ဤနေရာတွင်ဖော်ပြထားသော ထုတ်ကုန်များနှင့် ဖွဲ့စည်းမှုစာရင်းသည် အသိပေးခြင်းမရှိဘဲ အပြောင်းအလဲများရှိနိုင်သည်။.
ပုံ