AC DC Motor Driving Control Trainer


Motor Driving Control Trainer Driving Control in Mechatronics System
1.Begrijp de structuur en het werkingsprincipe van mechanische en elektrische transmissiecontrole;
2.Karakteristieke test van AC-motor en DC-motor:
3.Relay-controle-experimenten van AC-motor en DC-motor
4.PLC-experimenten
5.Mechanische transmissie-experimenten
- Beschrijving
- Navraag
Beschrijving
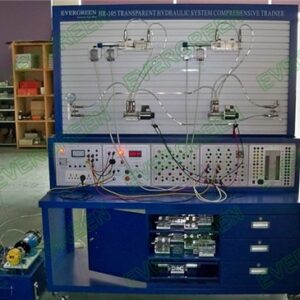
Trainer voor motorrijcontrole kan controle-experimenten van AC-motor en DC-motor voltooien. Dit trainingssysteem bestaat uit een AC-motor, gelijkstroommotor, frequentie omzetter, koppelen, verloopstuk, en enz. Ondertussen:, de besturingseenheid van Trainer voor motorrijcontrole is relais en PLC. Als resultaat,AC DC Trainer voor motorrijcontrole in Mechatronica Systeem is een idee om apparatuur voor mechanisch te leren Engineering, automatisering op universiteiten, hogescholen, scholen voor beroepsonderwijs, en technische scholen heen en weer:
1.Begrijp de structuur en het werkingsprincipe van mechanische en elektrische transmissiecontrole;
2.Kenmerkende test van AC-motor en DC-motor
3.Relaisbesturingsexperimenten van AC-motor en DC-motor
4.PLC-experimenten
5.Mechanische transmissie-experimenten
Experimentele inhoud
Trainer voor motorrijcontrole Experimentele inhoud
1,AC motor experimenten
1.1.AC-motor(tijdrelais controle)serie rotor weerstand start
1.2.AC-motor start in variabele spanning
1.3.AC motor joggen / automatische controle
1.4.Wisselstroom motorfiets werk en terug naar het begin
1.5.AC-motor Y- △ start met verlaagde spanning
1.6.AC motor reverse sluit rem aan:
1.7.AC-motor (huidige controle)serie rotor weerstand start
1.8.Dynamisch remmen AC-motor
1.9.AC-motor positieve en negatieve draairegeling:
1.10.AC Motor variabele frequentieregeling:
1.11.AC motor variabele frequentie rem
2, DC-motor experimenten
2.1.DC-motor positieve en negatieve beurt:
2.2.DC serie weerstand start
2.3.DC-motor start met verlaagde spanning
2.4.DC-motor variabele weerstandsregeling:
2.5.DC-motor variabele spanningsregeling
2.6.Dynamisch remmen van gelijkstroommotor
2.7.Aansluiting voor omkering van gelijkstroommotor
2.8.DC-motor stopt remmen;
3, Mechanische transmissie-experimenten
3.1. Elektromechanische aandrijfsysteem splitsingsexperimenten
3.2. Efficiëntietest kettingaandrijving
3.3.De rotatietraagheid van het systeem berekenen en testen
4, Experimenten met PLC-programmeerbare controllers (optioneel)
4.1.Digitale hoeveelheid(digitale waarde)
4.2.Analoog signaal(analoge hoeveelheid)
4.3.PLC-communicatie
Belangrijkste technische parameters:
Belangrijkste Ttechnisch Parameters
| Trainer voor motorrijcontrole | Specificatie | |
| Artikelnummer | 0405010140 | |
| Gelijkstroommotor | Stroomvoorziening | 220V |
| Stroom | 0.75Kw | |
| Koppel | 4.72Nm | |
| Snelheid | 1500R / min | |
| AC-motorreductiemiddel | Stroomvoorziening | 380V |
| Stroom | 0.75Kw | |
| Koppel | 2.3Nm | |
| Snelheid | 950R / min | |
| Cycloïde snelheidsreductor | Reductieverhouding | 1: 9 |
| Koppel | 0-250Nm | |
| Frequentie omzetter | Stroomvoorziening | 380V |
| Stroom | 0.75Kw | |
| Uitgangsfrequentie: | 0.1 ~ 400Hz | |
| Koppel- en snelheidssensor | Bereik | 0-20Nm |
| Toerentelleruitgang | 60 pulsen/spoel | |
| Module | PLC | S7-200-serie CPU224 |
| ADVERTENTIE | Siemens EM235 | |
| Koppelsensor | Bereik | 0-20Nm |
| Laden | 14kg/st. | |
| Gewicht | 1kg, 4stuks | |
| Afmetingen van de bank | L × B × H | 1550 × 730 × 1700 mm |
| Transmissieafmetingen | L × B × H | 1200 × 600 × 50mm |
| De hoogte van het transmissieframe | 2000mm | |
*Producten en configuratielijst die hierin worden beschreven, kunnen zonder voorafgaande kennisgeving worden gewijzigd.
Afbeelding