Instrutor de controle de direção de motor AC DC


Motor Driving Control Trainer Driving Control in Mechatronics System
1.Compreender a estrutura e o princípio de funcionamento do controle de transmissão mecânica e elétrica
2.Teste característico do motor CA e do motor CC
3.Experimentos de controle de relé de Motor CA e motor CC
4.experimentos PLC
5.experimentos de transmissão mecânica
- Descrição
- Investigação
Descrição
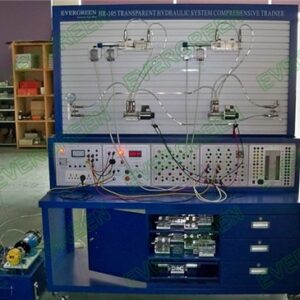
Treinador de controle de direção motorizada pode completar experimentos de controle de motor AC e motor DC. Este sistema de treinamento é composto de motor AC, motor DC, conversor de frequência, acoplamento, redutor, e etc. Enquanto isso, a unidade de controle de Treinador de controle de direção motorizada é relé e PLC. Como resultado,AC DC Treinador de controle de direção motorizada em Sistema Mecatrônico é uma ideia de ensino de equipamentos para mecânica Engenharia, automação em universidades, faculdades, escolas vocacionais, e escolas técnicas de e para:
1.Compreender a estrutura e o princípio de funcionamento do controle de transmissão mecânica e elétrica
2.Teste característico de Motor CA e motor CC
3.Experimentos de controle de relé de motor AC e motor DC
4.experimentos PLC
5.experimentos de transmissão mecânica
Conteúdo Experimental
Treinador de controle de direção motorizada Conteúdo Experimental
1,experimentos com motores CA
1.1.motor CA(controle de relé de tempo)início da resistência do rotor em série
1.2.Partida do motor CA em tensão variável
1.3.Jog do motor CA / controle automático
1.4.Trabalho de motocicleta AC e de volta ao início
1.5.motor CA Y- △ partida com tensão reduzida
1.6.Freio de conexão reversa do motor CA
1.7.motor CA (controle atual)início da resistência do rotor em série
1.8.Frenagem dinâmica do motor CA
1.9.Controle de giro positivo e negativo do motor CA
1.10.Controle de frequência variável do motor CA
1.11.Freio de frequência variável do motor CA
2, Experimentos com motores DC
2.1.Volta positiva e negativa do motor DC
2.2.Início da resistência em série DC
2.3.Partida de tensão reduzida do motor DC
2.4.Controle de resistência variável do motor DC
2.5.Controle de tensão variável do motor DC
2.6.Frenagem dinâmica do motor DC
2.7.Conexão de reversão de potência do motor DC
2.8.Frenagem de entupimento do motor DC
3, experimentos de transmissão mecânica
3.1. Experimentos de emenda do sistema de acionamento eletromecânico
3.2. Teste de eficiência da transmissão por corrente
3.3.A inércia rotacional do sistema calculando e testando
4, Experimentos de controlador programável PLC (opcional)
4.1.quantidade digital(valor digital)
4.2.Sinal analógico(quantidade analógica)
4.3.comunicação PLC
Principais Parâmetros Técnicos
Treinador de controle de direção motorizada
Principal Ttécnico Parâmetros
| Treinador de controle de direção motorizada | Especificação | |
| SKU | 0405010140 | |
| Motor DC | Fonte de energia | 220V |
| Poder | 0.75Kw | |
| Torque | 4.72Nm | |
| Velocidade | 1500r / min | |
| Motor redutor AC | Fonte de energia | 380V |
| Poder | 0.75Kw | |
| Torque | 2.3Nm | |
| Velocidade | 950r / min | |
| Redutor de velocidade ciclóide | Taxa de redução | 1: 9 |
| Torque | 0-250Nm | |
| Conversor de frequência | Fonte de energia | 380V |
| Poder | 0.75Kw | |
| Frequência de saída | 0.1 ~ 400 Hz | |
| Sensor de torque e velocidade | Variar | 0-20Nm |
| Saída do Tacômetro | 60 pulsos/bobina | |
| Módulo | CLP | CPU224 da série S7-200 |
| DE ANÚNCIOS | Siemens EM235 | |
| Sensor de Torque | Variar | 0-20Nm |
| Carregar | 14kg/unidades | |
| Peso | 1kg, 4peças | |
| Dimensões da bancada | C × L × A | 1550 × 730 × 1700mm |
| Dimensões da Transmissão | C × L × A | 1200 × 600 × 50 mm |
| A altura do quadro de transmissão | 2000milímetros | |
*Os produtos e a lista de configuração aqui descritos estão sujeitos a alterações sem aviso prévio.
Foto